
Overview
The Extreme Driving Dataset captures the driving that conventional datasets rarely cover — emergency and limit-handling maneuvers alongside adverse weather and low-light conditions. Each episode bundles fully time-synchronized streams: five surround RGB cameras, a ZED 2i stereo pair with per-frame dense depth, forward-facing LiDAR, and GNSS / chassis dynamics, all resampled to a uniform 4 Hz grid. It spans 589 episodes across 6 scene categories, built to support autonomous-driving and intelligent-chassis research.
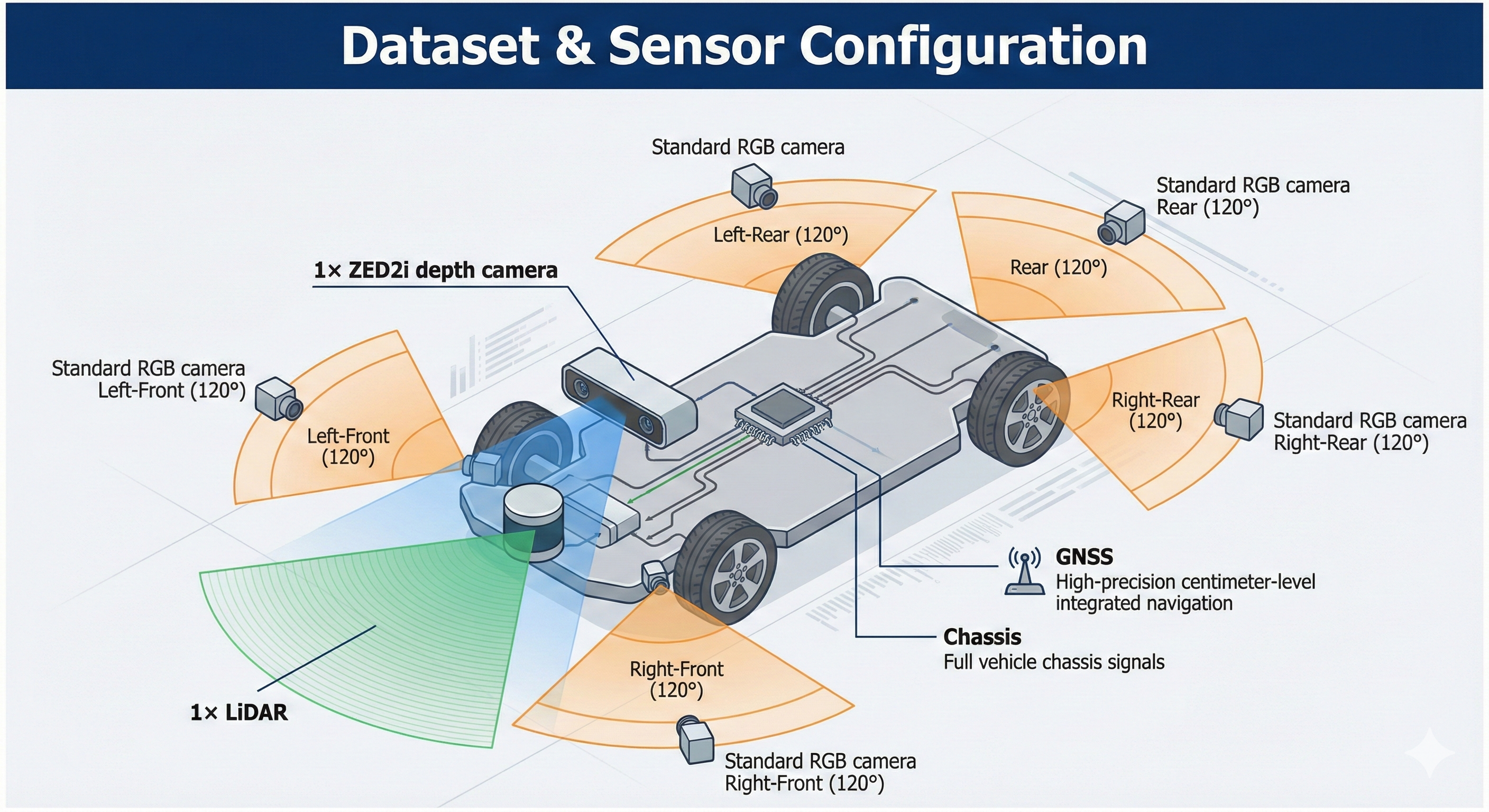
Sensor Configuration
- 5× Surround RGB cameras (front-left, front-right, rear-left, rear-right, rear-center)
- ZED 2i Stereo camera — left + right RGB with per-frame dense depth maps (.npy)
- LiDAR Forward-facing LiDAR point clouds (.npy) per frame
- GNSS High-precision GPS: north/east velocity, absolute heading, centimeter-level positioning
- Chassis Speed, yaw rate, raw IMU (X/Y acceleration) — direct side-slip angle derivation
Scene Categories
Six scene categories span everyday driving through safety-critical and adverse conditions. Each episode contains fully synchronized multi-sensor streams — surround RGB, ZED stereo + depth, LiDAR, and vehicle dynamics — resampled to a uniform 4 Hz grid. Select any category to open dataset access.
Scene Demos
Synchronized multi-sensor recordings across all scene categories. Select a category and clip to preview.
Global Collaboration Seeking worldwide partners
We invite global collaborators to jointly develop fusion datasets for autonomous driving and intelligent chassis, and algorithms for dataset development and utilization.
- Real-vehicle data collection and closed-loop verification platform
- In-house server: 8× NVIDIA RTX 5090 GPUs
- Broad industry partnerships for validation and deployment
We are recruiting interns in computer science, with a stipend of 100–300 RMB per day and support for industry and academic recommendations.
Interested in co-development, data partnership, or internships? Contact us
Team
Intelligent Chassis Team · School of Vehicle and Mobility, Tsinghua University
Shiyue Zhao · Yuhong Jiang · Xinhan Li · Chengkun He · Junzhi Zhang
Citation
@misc{extreme_driving_dataset_2026,
title = {Extreme Driving Dataset: Multi-Modal Episodes
for Critical and Adverse-Condition Driving},
author = {Shiyue Zhao and Yuhong Jiang and Xinhan Li
and Chengkun He and Junzhi Zhang},
howpublished = {Intelligent Chassis Team, School of Vehicle
and Mobility, Tsinghua University},
year = {2026}
}